单个相机只能获得一幅图像。实际意义是三维空间在二维空间上的一个投影。准确的说是变形的投影,因为相机投影关系和三维空间在二维基上最小二乘映射并不完全相同。那我是不是能设计一种可以映射的相机模型?
多视角几何的极线约束
1P=12T2P
式中1,2分别表示相机1和相机2的坐标系。T表示两个坐标系的变换矩阵
12T=(12R0T12T1)
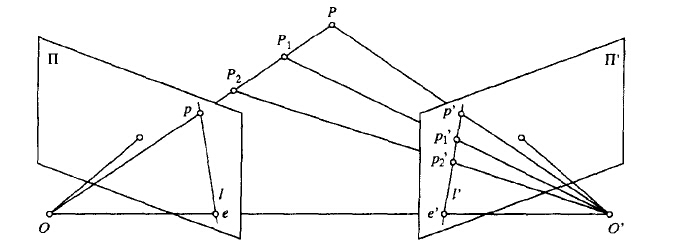
12T=OO′→
OP→∗[OO′→×O′P′→]=0
p∗[t×(Rp′)]=0
这里是把所有向量都在1坐标系下表示的写法,把向量表达为坐标值O′P′→ 在 O 坐标系下的表示不需要平移(因为是向量所以无所谓从哪儿开始)
那么称[t×R]为极几何的本征矩阵。它描述了极几何的性质。 [t×R]=[t×]R
矩阵为R3×3 9个参数即可确定。
弱标定
如果相机没有经过内部标定,代入的是图像点坐标而不是相机坐标系坐标,那么可以找到两幅图像8个点对,求取极几何矩阵。这种求法成为弱标定。
版权声明:本文为博主原创文章,未经博主允许不得转载。